AUTOSAR 入门教程(3)Watchdog Services
🚨 AUTOSAR 看门狗服务是保障车载系统可靠性的关键机制 💪,它能有效监控软件执行时序和逻辑正确性,避免因软件故障导致系统异常运行。在功能安全要求严格的汽车电子系统中,看门狗服务是防止系统失效的最后一道防线 🔒。
🧠 1. Watchdog Services 核心概念
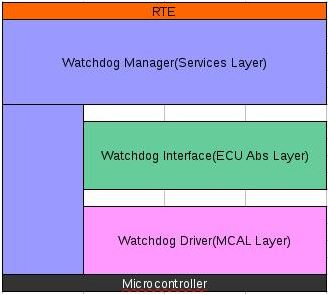
💡 Watchdog Services 是 AUTOSAR 分层架构中的一组模块,包含:
- 🔹 Watchdog Manager(服务层)
- 🔹 Watchdog Interface(ECU 抽象层)
- 🔹 Watchdog Driver(MCAL 层)
这些模块共同监控应用程序和基础软件中**被监督实体(Supervised Entity)**的执行状态。被监督实体可以是任意函数或 runnable(可独立执行的指令集合)📌。
🔍 2. 三种监控类型及工作原理
2.1 ⏱️ Alive Supervision(存活监控)
- 用途:监控周期性执行实体的执行频率
- 实现:通过检查点(Checkpoints)记录执行次数
- 示例:1ms 任务每 10ms 检查一次,计数器应在 10±误差范围内更新
2.2 ⏳ Deadline Supervision(时限监控)
- 用途:监控实体在规定时间内的执行完成情况
- 实现:记录开始和结束检查点的时间戳差值
- 示例:10ms 内必须完成的任务,超时即触发监控 ⚠️
2.3 🧩 Logical Supervision(逻辑监控)
- 用途:监控程序执行流程的正确性
- 实现:在条件分支放置检查点验证执行路径
- 示例:验证程序是否按预期执行了正确分支 ✅
🏗️ 3. 状态机与故障处理机制
📊 Watchdog Manager(WdgM)通过两级状态进行监控:
| Global Supervision Status WdgM | Local Supervision Status of Supervised Entities |
|---|---|
| WDGM_GLOBAL_STATUS_OK | WDGM_LOCAL_STATUS_OK |
| WDGM_GLOBAL_STATUS_FAILED | WDGM_LOCAL_STATUS_FAILED |
| WDGM_GLOBAL_STATUS_EXPIRED | WDGM_LOCAL_STATUS_EXPIRED |
| WDGM_GLOBAL_STATUS_STOPPED | |
| WDGM_GLOBAL_STATUS_DEACTIVATED | WDGM_LOCAL_STATUS_DEACTIVATED |
🔄 故障处理流程:
1️⃣ 监控周期内评估被监督实体
2️⃣ 更新本地状态和失败计数器
3️⃣ 达到阈值后更新全局状态
4️⃣ 全局失败计数器超限时触发系统复位 🔄
🤝 4. 模块协作与复位机制
- WdgIf:在多驱动环境下路由 WdgM 请求 🚦
- Wdg Driver:负责底层硬件操作,包括:
- 驱动初始化 ⚙️
- 管理操作模式(关闭/快速/慢速模式) 🔄
- 设置看门狗触发条件 ⚠️
正常运行时,WdgM 通过 WdgM_SetTriggerCondition 提供非零值避免复位;故障时提供 0 值触发硬件复位 💥。
🏆 5. 实施建议与最佳实践
🔧 对于安全关键系统,建议结合 AUTOSAR 功能安全扩展(FuSa)进行完整的安全机制设计:
- ✅ 检查点设计:合理设置检查点密度,平衡监控精度和系统开销
- ✅ 阈值配置:根据功能安全等级确定适当的失败阈值
- ✅ 模式管理:正确配置 WdgM 的工作模式和状态转换条件
- ✅ 测试验证:通过故障注入测试验证看门狗机制的有效性
💡 确保看门狗服务能满足 ASIL 等级要求,为车载系统提供可靠的安全保障 🛡️。